Nanocopter AI challenge
Tiny drones are lightweight and small, so they are safe for people and can navigate in narrow spaces. These properties make them very promising for real-world applications in which they have to fly in indoor environments. One can think of tiny drones exploring buildings for finding humans in search and rescue, finding gas leaks, tracking stock in warehouses, or monitoring crop in greenhouses.
In this competition, we want to push the state of the art for the autonomy of tiny drones. Specifically, we would like teams to develop the AI for Bitcraze’s Crazyflie nanocopters to perform vision-based obstacle avoidance at increasing speeds. The Crazyflies used in the competition will be equipped with an “AI deck” featuring a camera and the Greenwaves processor, which is able to run deep neural networks. Although the competition allows offboard processing of the (monocular) images, solutions that run purely onboard will receive a higher score.
You can find the current version of the rules here. Please note that these rules can be subject to (likely minor) changes over time, based on feedback from participating teams, etc.
Nanocopter_challenge_v1_1
Pre-registering for the competitions
Each competition has a limited number of places for participating teams. Hence, if you want to participate in any of these competitions, please let us know before May 15 with a “pre-registration”.
Pre-registration means sending an email to imavsdotorg@gmail.com, including the following information:
- Team name
- Team members
- Affiliation (University, institute, company, or otherwise) & Country/countries
- Which competition(s) you want to participate in, and what your rough plan is for the competition(s).
- Mention experience with past competitions
Simulation
To speed up the development process, we provide a simulator based on the Crazyflie simulation by Bitcraze (https://github.com/bitcraze/crazyflie-simulation). This will allow teams to quickly prototype avoidance algorithms in a representative environment.
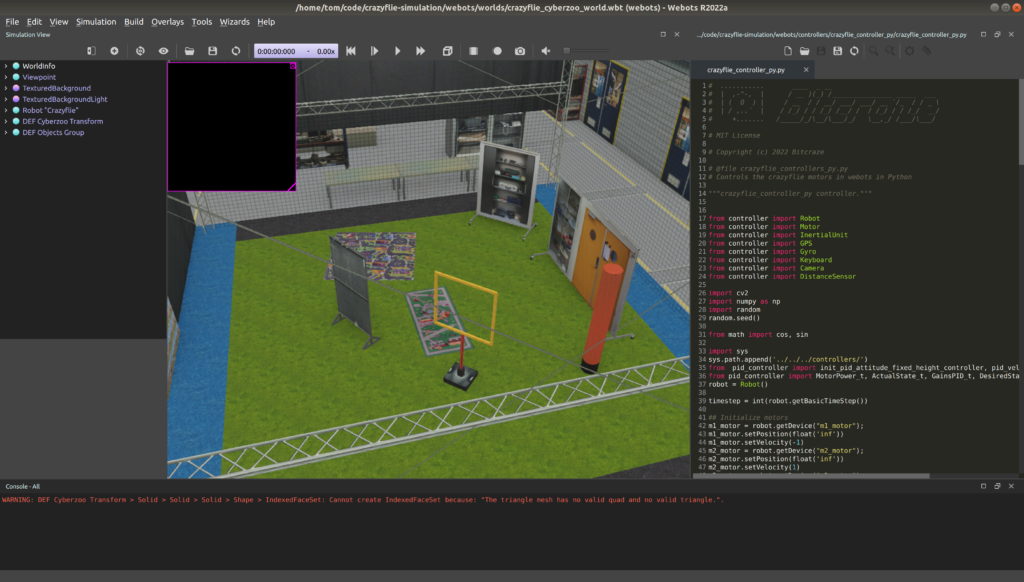
The provided simulator is based on the Webots open source robot simulator (https://cyberbotics.com/). The repository contains a world model that contains a gate and obstacles that should resemble those in the final competition. Code for this simulator can be written in Python or in C. A Python example using OpenCV is included.
To install the simulator, clone the repository using `git clone https://github.com/tudelft/crazyflie-simulation`. Then, inside the new directory (`cd crazyflie-simulation`), run `make all` to compile the controllers and set up the Python virtual environment, and `make run` to launch the simulator.
No Gazebo simulation is provided at this time. However, Gazebo world and object files are available at https://github.com/tudelft/gazebo_models.
NEW:
Viewing camera images via WiFi – Bitcraze blogpost
Using the AI deck for CRTP over WiFi (via CPX) | Bitcraze
If any of the candidates for the nanoquadcopter competition rather like to do full offboard control, this might be a good resource.
Photos of the actual gates
The gates have an inner size (hole) of 40 x 40 cm. The orange border is 94 mm wide and the hole’s center point is 1m off the ground.


