INDOOR COMPETITION
![]() AGUIBOT-1 – Universidad Popular Autónoma del Estado de Puebla
AGUIBOT-1 – Universidad Popular Autónoma del Estado de Puebla
![]() AKAMAV – Technischen Universität Braunschweig
AKAMAV – Technischen Universität Braunschweig
![]() AUTMAV – Tehran Polytechnic
AUTMAV – Tehran Polytechnic
![]() BLACK BEE DRONES – Universidade Federal de Itajubá
BLACK BEE DRONES – Universidade Federal de Itajubá
![]() CVAR-UPM – Universidad Politécnica de Madrid
CVAR-UPM – Universidad Politécnica de Madrid
![]() CYRUS – Lorestan University Center
CYRUS – Lorestan University Center
![]() DOTMEX – National Polytechnic Institute
DOTMEX – National Polytechnic Institute
![]() FLY EAGLE – Beijing Institute of Technology
FLY EAGLE – Beijing Institute of Technology
![]() HORIZON – Islamic Azad University Of Khomeinishahr Branch
HORIZON – Islamic Azad University Of Khomeinishahr Branch
![]() INSTINCT COUGAR – National University of Singapore
INSTINCT COUGAR – National University of Singapore
![]() ISAE – ISAE SUPAERO
ISAE – ISAE SUPAERO
![]() JEDI – Wroclaw University of Science and Technology
JEDI – Wroclaw University of Science and Technology
![]() KRATOS – Hindustan university
KRATOS – Hindustan university
![]() MAVLAB – TUDELFT
MAVLAB – TUDELFT
![]() MRL – Qazvin Azad University
MRL – Qazvin Azad University
![]() NITTANY JUGADOOS – Pennsylvania State University
NITTANY JUGADOOS – Pennsylvania State University
![]() PERSIS – Islamic Azad University Khomeinishar Branch
PERSIS – Islamic Azad University Khomeinishar Branch
![]() QUETZALC++ – Instituto Nacional de Astrofísica, Óptica y Electrónica
QUETZALC++ – Instituto Nacional de Astrofísica, Óptica y Electrónica
![]() RMIT – RMIT University
RMIT – RMIT University
![]() SRC – Islamic azad university of Tabriz
SRC – Islamic azad university of Tabriz
![]() UI-AI – Islamic Azad University Of Isfahan
UI-AI – Islamic Azad University Of Isfahan
![]() WHU DEEPFLYER – Wuhan University
WHU DEEPFLYER – Wuhan University
Each team registered to the indoor competition will be awarded a 15-minute time slot.
Indoor mission
- Take-off
- take-off are performed from a pad that can be fixed or moving
- points are awarded for every MAV that performs at least one other mission element during its flight, except precision landing (taking off and landing is not enough to count as a valid mission flight)
- Flying through the window
- the MAV must pass through one of windows or the pipe on a wall
- Flying through the “obstacles” zone
- several obstacles must be crossed with different difficulties
- fixed poles (simple structured colored elements)
- vegetation (unstructured elements)
- fans (turbulent atmosphere)
- it is possible to use the straight line path without obstacle at any step
- each type of obstacle can be attempted separately or in a row (and in-a-raw factor will be applied except if straight line path is used)
- if a MAV flies above the obstacles, points will not be awarded
- for the fans, if a MAV is pushed away from the corridor materialized by two poles, points will not be awarded
- several obstacles must be crossed with different difficulties
- Target detection and recognition
- a target is placed on the ground after the “obstacle” zone
- the task is to find the target and process the data on it (QRCode)
- the data found on this target is a reference of an object that should be dropped in the “drop” zone
- Drop zone
- a “drop” zone is after the “obstacle” close to the target
- the object to drop depends on the data found on the target and can’t be carried a-priori on the MAV (as the possible choice is large, i.e. medicines)
- the two choices are
- go back to the beginning through the “obstacle” zone, pick the product, come back and drop
- send the information to a second MAV that flies to the drop zone with the correct product
- Cooperative carrying
- at least 2 drones should carry a weight over a distance of 10 meters
- attaching the MAVs to the weight can be done by team members, no autonomous grasping are required
- 2 objects of different weight can be chosen by the teams
- Precision landing
- the MAV can perform a precision landing on either the fixed or moving platform
- in case of rough landing, the team will be asked to demonstrate the airworthiness of the vehicle
- extra points are awarded if the MAV is able to take-off again after staying still 10 seconds on the ground and without any operator intervention




| Mission elements | Mission score |
|---|---|
| Take-off | 0 from fixed pad 1 from moving pad |
| Fly through the wall | pipe: 2 small window: 1 large window: 0.5 |
| Fly through obstacle zone | straight path: 0.5 per MAV fixed poles: 1 per MAV vegetation: 1.5 per MAV fans: 1.5 per MAV |
| Target detection | 1 for a clear view of the target 1 for reading the data |
| Drop zone | 1 for dropping the correct object inside the drop zone +1 if the drop is done in one row after flying through one of the window and the obstacle area |
| Cooperative carrying | 1 per MAV involved if the minimum distance is reached x3 bonus when using the heavy payload +1 for precision landing of the carried weight |
| Landing (precision) | 0.5 on the fixed pad 1 on the moving pad extra points: +0.5 if taking off after 10 seconds staying still without any operator assistance |







60-cm diameter fan for the « fan zone » – indoor competition arena.
Note that 3 such fans will be installed to generate crosswind.
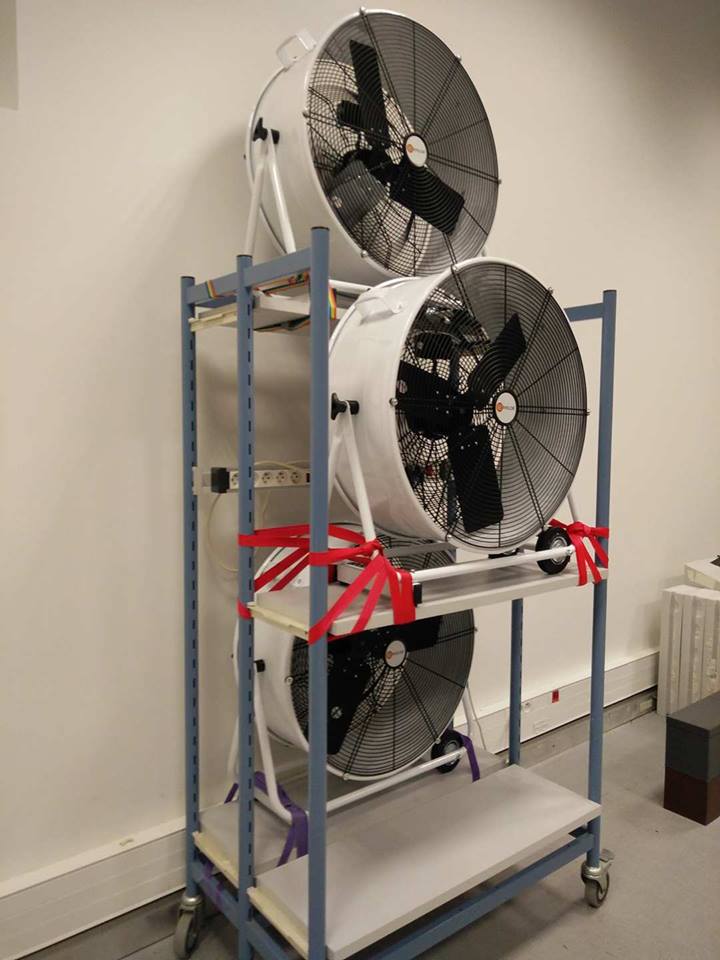
Fans setup for the « Fan zone » area, indoor competition. Height is 2.36m, average wind speed is about 5 m/s.

Boat deck platform for take-off & landing: a 70x70cm square platform above a moving robotic arm.
Note: The platform is located at 110cm above the ground. The center of the square platform will be maintained constant. The lateral motion amplitude is limited to ± 45 cm with a maximum speed of 25 cm/s. The platform may be tilted with a maximum angle of ± 10°.

Dummy in lying position
Indoor cooperative flight
At least 2 drones should carry a 1mx1m wooden frame over a distance of 10 meters.
Attaching the MAVs to the weight can be done by team members, no autonomous grasping are required.

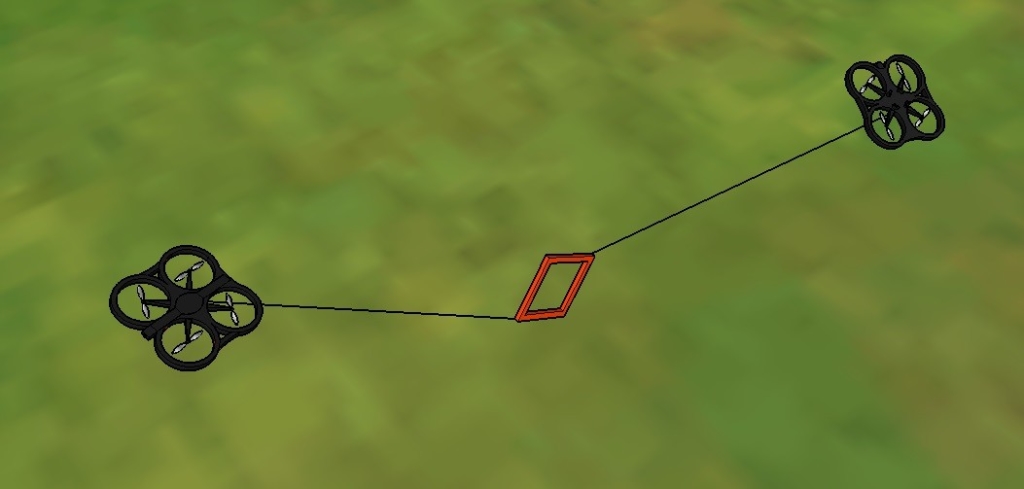

A lighter plastic frame that can be used with small micro-drones is being fabricated with the same size 1 meter x 1 meter and a final weight between 400 and 500 grams. A bonus on the mission point will be applied when using the heavy wood frame. A photograph will be posted soon.