






Keynote Speakers


"Fabrication, sensing, and feedback control in the flight of a fly-sized flying robot"
"10 year after my first IMAV award!"
Abstracts and Biographies
Eric N. Johnson
"Innovations in Navigation, Guidance, and Adaptive Control to Enable Small Unmanned Aircraft Systems"
The Georgia Institute of Technology Unmanned Aerial Vehicle Research Facility team is known for its research in the areas of navigation, guidance, and control; including flight testing. This work has included the first air launching of a hovering aircraft, the first automatic transition of an airplane to/from tail-sitting hover, vision-only formation flight, vision-aided inertial navigation, automatic helicopter flight with simulated stuck swash plate actuator, and automatic airplane flight with half of one wing missing. The navigation, guidance, and control challenges for Unmanned Aerial Systems (UASs) are among the most significant barriers to wider practical use of these systems for military or non-military use. This includes sensing and avoiding other aircraft and obstacles as well as navigation without reliance on Global Positioning Satellite systems. This presentation will address recent progress in the areas UAS navigation, guidance, and control, with emphasis on adaptive flight control, vision-aided inertial navigation, and laser-aided inertial navigation. This will include progress in both theory and related flight test validation on unmanned research aircraft.
Biography:
Eric N. Johnson is the Lockheed Martin Associate Professor of Avionics Integration, Daniel Guggenheim School of Aerospace Engineering, Georgia Tech. He received a B.S. degree from University of Washington, M.S. degrees from MIT and The George Washington University, and a Ph.D. from Georgia Tech, all in Aerospace Engineering. He also has five years of industry experience working at Lockheed Martin and Draper Laboratory. As Georgia Tech faculty since 2001, he has performed research in adaptive flight control, aided inertial navigation, and autonomous systems. He was the lead system integrator for rotorcraft experiments for the DARPA Software Enabled Control program, which included the first air-launch of a hovering aircraft, automatic flight of a helicopter with a simulated frozen actuators, and adaptive flight control. He was the principal investigator of the Active Vision Control Systems AFOSR Multi-disciplinary University Research Initiative (MURI), which culminated in vision-based air-to-air tracking and vision-aided inertial navigation experimental validation. His most recent work has included automatic low altitude high speed flight of helicopters, indoor and outdoor vision-aided inertial navigation, adaptive flight control, and methods for sensing and avoiding other aircraft.
Sawyer B. Fuller
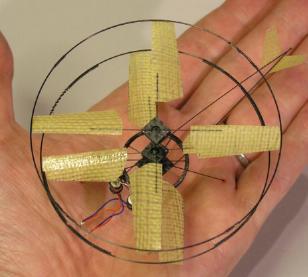
"Fabrication, sensing, and feedback control in the flight of a fly-sized flying robot"
Miniaturizing a flying robot down to the size of a fly is a significant challenge, but the result will be a platform with unique capabilities. For example, low material cost could enable swarms of hundreds or even thousands of them to be deployed. I will describe an effort that I am a part of to develop a robotic flower pollinator, or "robobee." Large number of these robots will autonomously fly from a hive and locate and pollinate flowers, returning to recharge when batteries are depleted. Recent progress has included the first controlled flight maneuvers of a vehicle with a 3 cm wingspan weighing 80 mg, demonstrating that the basic mechanics are in place. I will describe the unconventional fabrication process, actuators, and unsteady flapping-wing aerodynamics that were necessary to scale the vehicle down to this size. I will further describe parallel efforts to develop the low-mass microprocessor, sensors, batteries, and power electronics that will be necessary for this vehicle to achieve autonomy.
Biography:
Sawyer B. Fuller is a Postdoctoral researcher at Harvard University. He obtained his B.S. and M.S. degrees in Mechanical Engineering at MIT. He recieved his Ph.D. in Bio-engineering at the California Insitute of Technology. The combination of biology and engineering degrees led to the design of a hopping rover for interplanetary exploration for NASA's Jet Propulsion Laboratory, an ink-jet printer to print patterns of nerve cells to study the nature of neural computation, and a printer for desktop fabrication of circuits and 3D microsopic machines. One of his current projects is the development of sensors and control systems for small vehicles. An example of such a small system is the Harvard Robobee, an insect-scaled flapping wing vehicle that can perform stable take-off and hover. Another ongoing project is about studying small animals (about the scale of the Robobee) to find inspiration for engineering problems. One example is the way how insects are able to fly with their eyes and antennas even if there is wind, while their brain size is very limited. From his observations he found a model for explaining stable flight of these animals. His findings might lead to more robust and dynamic robots as well a better understanding of how the brain controls motion.
Petter Muren, CTO & Founder of Prox Dynamics AS
"10 year after my first IMAV award!"
The story, however, starts much earlier... One day, as a little kid, I was sitting at my desk doing my homework when my thoughts started to drift - I was imaging a small helicopter floating in the air in front of me, totally stable and almost silent. More than 40 years ago this was pure science fiction. The fiction became reality and in 2004 I went to Toulouse with the Proxflyer Mosquito, a small, silent, passively stable helicopter capable of precisely maneuvering around inside your rom. I won my first IMAV award. Ten years after this silent flight in Toulouse, my company Prox Dynamics AS is about to release the Block-II version of the PD-100 Black Hornet helicopter. The Black Hornet is the world's first operational Nano UAS. The helicopter fits in the palm of your hand, weighs 16 grams, has a GPS, an advanced autopilot, 3 cameras and a robust - hard to intercept - digital radio link. This is the story of how me, and my friends managed to go from a futuristic childhood dream via a student MAV competition to become the world's leading Nano UAS manufacturer...
Biography:
Petter Muren has 28 years of experience as an R&D engineer and an R&D Manager. He is holding a Master of Science degree from the Norwegian Institute of Technology and he is very multidisciplinary with a broad experience covering; mechanics, micro mechanics, aero/hydro-dynamics, electronics, real-time software, video cameras, fiber-epoxy composite, industrial design, prototyping and high volume serial production. He was Mechanical R&D Manager in Tandberg ASA for 14 years after serving 7 years as a Software development engineer and an Electronic department manager in two Norwegian technology companies. Mr. Muren has been the founder and Managing Director of three other companies; Prox Dynamics AS the manufacturer of the world's first operational Nano UAS, Prox ANS doing technical consultant work and Proxflyer AS developing micro sized helicopters and toy helicopters. He invented the passively stable "Proxflyer" rotor system, designed the highly successful Bladerunner series of RC toy helicopters and the iFly series of micro ornithopters. He has also designed and built the 4 smallest remotely controlled helicopters in the world. Mr. Muren holds several Norwegian and international patents and he is currently serving as CTO in Prox Dynamics AS.

